
PickNik Robotics:
Hardware-agnostische Robotik-Lösungen
Situation
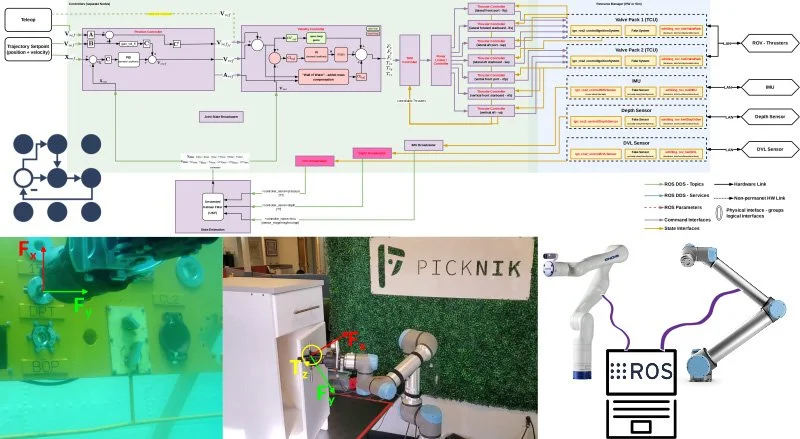
PickNik ist das weltweit führende Unternehmen für Robotik-Manipulationslösungen, sowohl auf der Erde als auch im Weltraum. PickNik ist in der Robotik- und Open-Source-Gemeinde sehr bekannt als das Unternehmen, das hinter dem Manipulations- und Bewegungsplanungs-Framework für ROS, MoveIt (und MoveIt2 für ROS 2), steht. Das MoveIt-Framework nutzt ros_control für die Hardware-Abstraktion und den agnostischen Zugang zu verschiedenen Roboterarmen, wie Universal Robots, ABB, KUKA, Kinova und Franka Emika.
Problem
Damals, im Jahr 2020, befassten sich viele Unternehmen mit dem Übergang von ROS und ROS 2 - und als führendes Beratungsunternehmen war PickNik eine natürliche Wahl für sie. Allerdings war das Kontroll-Framework für ROS 2, ros2_control, noch nicht freigegeben und war vielen Änderungen unterworfen. Dies bedeutete für PickNik ein großes Risiko, dieses Projekt zu übernehmen und möglicherweise nicht rechtzeitig zu liefern.
Durch gegenseitige Verbindungen in der ROS-Welt wurden sie auf eine neue Firma, Stogl Robotics, aufmerksam, die sich auf Robotersteuerung mit ROS (2) under Verwendung von ros(2)_control spezialisiert hatte. Sie fühlten sich von einem ähnlichen Beratungsstil und dem tiefgreifenden Wissen und Verständnis der in ROS verwendeten Steuerungsstacks und deren Funktionalität angezogen.
Lösung
Um neue Robotiklösungen für ROS 2 zu entwickeln und bestehende Robotertreiber von ROS auf ROS 2 umzustellen, brachte Stogl Robotics seine Expertise im Bereich ros2_control ein, um dessen Kernfunktionen zu erweitern und anzupassen.
Im Rahmen mehrerer Projekte haben PickNik und Stogl Robotics viele kommerzielle und auch kundenspezifische Roboter in ROS 2 verfügbar gemacht, indem sie ros2_control-Treiber implementiert, erweitert und verbessert haben. Darüber hinaus steigerte die intensive Beteiligung von Stogl Robotics an der Entwicklung von ros2_control die Effizienz des PickNik-Teams, da sie durch die Zusammenarbeit wichtigen Änderungen immer einen Schritt voraus waren.
Um die Entwicklung und das Testen für das Remote-Team von PickNik zu vereinfachen, hat Stogl Robotics eine Erweiterung für ros_control entwickelt, welche eine einfache Simulation ermöglicht und sich nahtlos in die Hardware-Treiber des Roboters integrieren lässt. Diese kleine Erweiterung hatte einen enormen Einfluss auf viele PickNik-Projekte, da sie eine einfachere Zusammenarbeit mit dem Team und den Kunden auf der ganzen Welt ermöglichte, und zwar unter Verwendung eines Workflows, der den Benutzern von ROS 1 vertraut ist.
Darüber hinaus hat Stogl Robotics als Maintainer von ros2_control dazu beigetragen, neue Funktionen, die von PickNik oder seinen Kunden entwickelt wurden, angemessen zu gestalten und die Zeitspanne für die Integration der Releases zu verkürzen.
Ergebnis
Die Beteiligung von Stogl Robotics führte rasch zur Lieferung von gut geschriebenem, funktionalem und getesteten Code, der sich nahtlos in die bestehenden Systeme von 4am Robotics einfügte. Diese Zusammenarbeit beschleunigte die Entwicklung verschiedener Anwendungsfälle in der Produktlinie von 4am, wie z.B. des autonomen Gabelstaplers AFI und des mobilen Roboters AMC-L, beträchtlich.
Das Team von Stogl Robotics ist erfreut, den Entwicklungsengpass effektiv behoben zu haben und das erwartete Niveau an Expertise in der Softwareentwicklung zu liefern. Wir danken 4am Robotics für das Vertrauen und die positive Bestätigung.
weitere erfolgreich abgeschlossene Projekte

07 FEB 2024

31 MAR 2023

15 FEB 2023

Vorwerk:
Simulation und Softwareentwicklung für Haushaltsroboter
30 JUN 2023